")
")
")
")
")
")
")
")
")
")
")
logo.png "光颉(Viking)")
")
")
")
")
")
")
")
")
")
")
")
")
")














最新上架
更多- 长晶基准电源CJ431系列电压基准芯片特点和应用领域
- 长晶CJ78MXX与CJ78MXXE系列线性稳压器可支持最大负载电流0.5A
- 适用于精密电路的风华1206薄膜电阻:TE06H系列薄膜电阻特性解析
- 长晶汽车数字晶体管AD-DTA、AD-DTC、AD-DTD三大系列产品优势和应用解析
- 长晶双极型通用类比较器LM393与LM339深度解析
- 长晶科技:全链布局3500+车规产品,深度赋能智能网联汽车多元场景
- 长晶科技车规级功率TVS二极管阵列守护汽车电子安全
- 长晶功率器件IGBT模块PIM系列产品技术解析
- 长晶汽车级开关二极管AD-1N等系列为现代汽车电子系统注入核心动力
- 抗硫化电阻选型漫谈:国巨AF系列与几个常见系列的横向对比
无人机激光雷达测绘用高精度惯性测量模块推荐
随着无人机技术的日益成熟和成本的大幅度降低,目前无人机激光雷达测量已经被广泛应用于电力巡线、地形勘探、矿山测量等领域。
随着雷达应用的快速发展,激光雷达测绘技术也迅速发展,它集成了激光测距系统、全球定位系统(GPS)和惯性导航系统三种技术于一体。其中激光雷达通过发射扫描激光,并检测激光反射,从而测量反射物到激光雷达的距离。在知道自身三维空间坐标系和激光扫描方向的情况下,能够实时获取测量系统周围的高分辨率的三维空间信息。

惯性测量模块在无人机激光雷达测绘系统中的作用是什么呢?
惯性测量模块的作用主要体现在两个方面。第一个是因为无人机的惯性导航系统中一般具有惯性测量单元(IMU),可以用来精确测量出激光雷达自身的姿态数据,从而计算出激光雷达的扫描方向。第二个重要作用是在测量过程当中,通常由卫星系统(BDS/GPS/GLONASS/GALILEO)+惯导系统来实现测量激光雷达自身的空间坐标。但是,卫星系统在某些地方没有信号(如隧道),且卫星系统位置信号相对来说是慢速信号,解算位置信息需要更快速的坐标信息更新,因此需要惯性测量单元(IMU)为无人机每秒来提供更多位置信息。
惯性测量单元(IMU)对激光测绘无人机测绘精度的影响
激光雷达测绘设备的指标包含了:系统参数指标,激光雷达单元指标、惯导系统指标等单元。惯性测量单元(IMU)精度决定了姿态和位置精度,因此直接影响系统精度。采用爱普生的M-G370,经过后处理,激光测绘雷达的惯导系统精度可以达到0.8°/H:
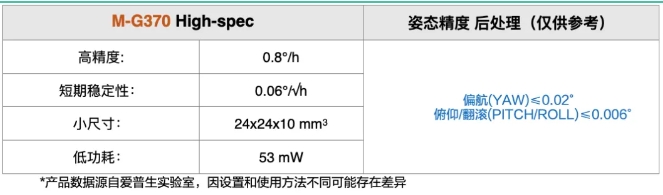
除了高精度,爱普生的惯性测量单元(IMU)还具有体积小、重量轻、功耗低的特点,有助于客户应用的小型化和轻型化的要求;并且产品设计能硬件和软件兼容,性能更稳定,也便于客户维护升级。
惯性测量模块(IMU)型号推荐:
| M-G370PDF1 | M-G370PDG0 | M-G366PDG0 | M-G330PDG0 |
南山电子是包括晶振晶体,实时时钟模块,和各类爱普生传感器的核心代理商,对M-G370、M-G366等高精度惯性导航模块备有现货样品,通过LOA备案后即可满足用户的无人机激光测绘雷达的研发需要。


